Zhou Zhang
Department of Mechanical Engineering Technology
New York City College of Technology, CUNY
Brooklyn, New York, USA zhzhang@citytech.cuny.edu
Andy S. Zhang
Department of Mechanical Engineering Technology
New York City College of Technology, CUNY
Brooklyn, New York, USA azhang@citytech.cuny.edu
Mingshao Zhang
Department of Mechanical and Industrial Engineering
Southern Illinois University Edwardsville
Edwardsville, Illinois, USA mzhang@siue.edu
Sven Esche
Department of Mechanical Engineering
Stevens Institute of Technology Hoboken, New Jersey, USA sesche@stevens.edu
Abstract— Robotics program at many Colleges has continued to become more and more popular. However, the students of the Bachelor of Technology (B.Tech.) program of robotics in the Mechanical Engineering Technology (MET) are facing three difficulties: (1) Weak fundamental knowledge related electrical engineering (EE), computer science (CS) and information technology (IT); (2) Difficulty in understanding the advanced concepts and theories of robotics; (3) Limited robotics class hours. Therefore, devising a series of appropriate robotics classes for the MET program is desirable.
In order to overcome the above-mentioned problems, four project-based courses for the robotics program is devised and implemented in the Department of MET. There are three levels of robotics courses ranging from ‘introduction’, ‘application’ to ‘advanced’. A series of projects corresponding to different levels are designed and then are assigned to students. The students learn and practice the fundamental theories of robotics through projects instead of mathematical analysis. These courses have two advantages. First, the projects let the students understand the theories spontaneously and expand the given projects with these theories. Second, the goal of the proposed courses is to release the dependency on advanced algorithms and optimization. Then, the students can familiarize themselves with the principal concepts of robotics, practice the application of hardware and software, create their own innovative projects and, prepare themselves for their entries into the job market, thus supporting the central educational goal of cultivating technologists in MET.
Keywords— Robotics, Mechanical Engineering Technology, Curricula Design
I. INTRODUCTION
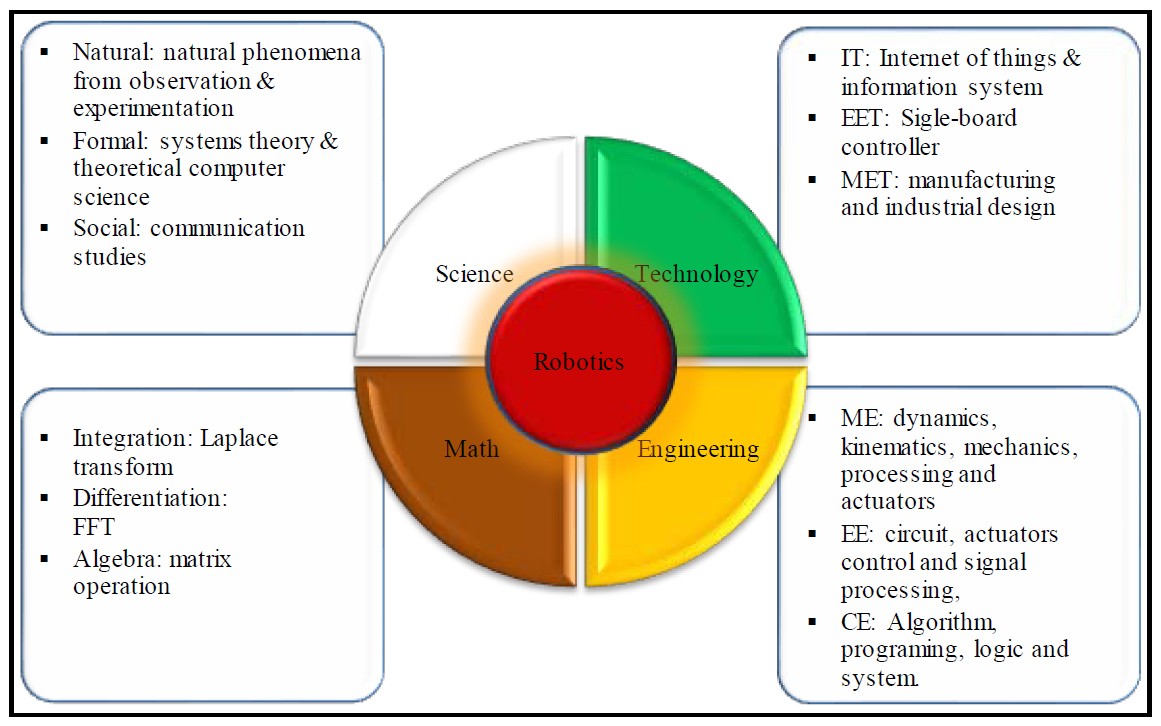
The fields of engineering and engineering technology have been broadened significantly by a number of emerging topics including additive manufacturing[1], internet of things (IoT)[2], artificial intelligence (AI)[3], virtual reality (VR)[4], etc. Currently, robotics is now integrating so many cutting-edge topics together to contribute to the world-wide innovations. Moreover, robotics has brought about a revolution at the Colleges. On one hand, the graduates of robotics gain great advantages over the traditional focuses in Mechanical Engineering (ME) or MET with respect to the employment opportunities and salaries[5]. Therefore, robotics is becoming one of the most attractive majors in the Department of ME and MET. On the other hand, robotics (as shown in Fig. 1) is one of the most comprehensive majors since it needs to address many extremely complicated problems involving science, technology, engineering and math (STEM), for example, algebra, ME, EE, CS, and IT[6]. In addition, some of the sub- topics related to STEM are also listed in Fig. 1. Hence, the students in robotics programs must master intensive interdisciplinary knowledge of STEM if they want to succeed in their chosen program. However, the students of B.Tech program of robotics in MET are suffering three difficulties:
- The weak fundamental knowledge of EE, CS and IT is the main obstruction[ 7 ]. In MET, the baccalaureate-level courses mainly focus on the mechanical system design, mechanics, dynamics, and simulation[ 8 ]. In addition, in reference [8], there are only two courses to introduce the mechatronics. Therefore, the students lack systematic training in the area of EE, CS and IT. It means that the instructors must go over the relevant knowledge in order to let students catch up with the requirements of the robotics classes.
- One more challenge is to understand the advanced concepts and theories[9]. B.Tech. is different from the Bachelor of Science(B.S.). The program of B.Tech. mainly focuses on the hands-on skills while B.S. emphasizes theories and concepts [10, 11, 12]. One of the educational goals in MET is to cultivate future technologists rather than researchers. The curricula of MET emphasize on the applications, but the curricula of ME emphasize the theories. This difference obviously impairs the students’ deeper understanding of the advanced concepts and theories.
- The limited class hours constrain the extended applications and furtherly result in the lack of opportunities to practice the knowledge of advanced robotics [13]. In addition, the limited class hours also make it difficult to go over the fundamental knowledge of EE, CS and IT listed in Fig. 1.
Fig. 1: Knowledge structure of robotics
In order to overcome the above problems, it is necessary to devise the appropriate courses for the B.Tech. program of robotics in the department of the MET while fully catering to the commitment of the college and the degree work of the BTech students [14].
II. HIERARCHICAL CURRICULA OF B.TECH. PROGRAM OF ROBOTICS
A. Current robotics curricula design and its limitation forB.Tech students
Although, the pre-college program of K-12 in some high schools opens robotics curricula to prepare the high school students for the successful transitions to postsecondary education and employment [15]. In this paper, only the robotics curricula for the B.Tech program of robotics are discussed. The robotics program is usually provided by EE, CS, or ME with major-oriented emphasis. In addition robotics curricula have been deployed at different levels of engineering and science education. In the college period, some institute takes robotics as an interdisciplinary engineering discipline[16]. Based on the commitments of the institutes and the students’ qualities, the degree paths should be different. Generally, fresh and sophomore are given the fundamental courses. For example, reference [17] introduced an implementation to migrate the components from the freshmen sequence into the sophomore engineering courses comprised of statics, circuits, and thermodynamics. Reference [18] used Lego Mindstorms kits to introduce the knowledge of robotics. Other implementations can be found in reference [19], reference [20]and reference [21]. Although these implementations are efficient for their programs, they are not appropriate for the junior classes of the robotics program in MET since the commercial robotics tools employed in these implementations prevent the students from practicing fundamental components. The senior-level robotics courses have been introduced in reference [22, 23, 24, 25, and 26]. In these kinds of literature, there are no exceptions to directly expose the students to the complicated control theories and algorithms. Certainly, this design method is reasonable for engineering students since they have more solid fundamental knowledge and stronger self-study ability. However, most of the students in the MET programs are struggling in mathematics classes. At the same time, they usually need to support themselves, and cannot totally devote themselves to the classwork. Therefore, how to utilize the limited class hours and how to integrate the knowledge into the practice become extremely critical.
B. Key components for successful curricula design
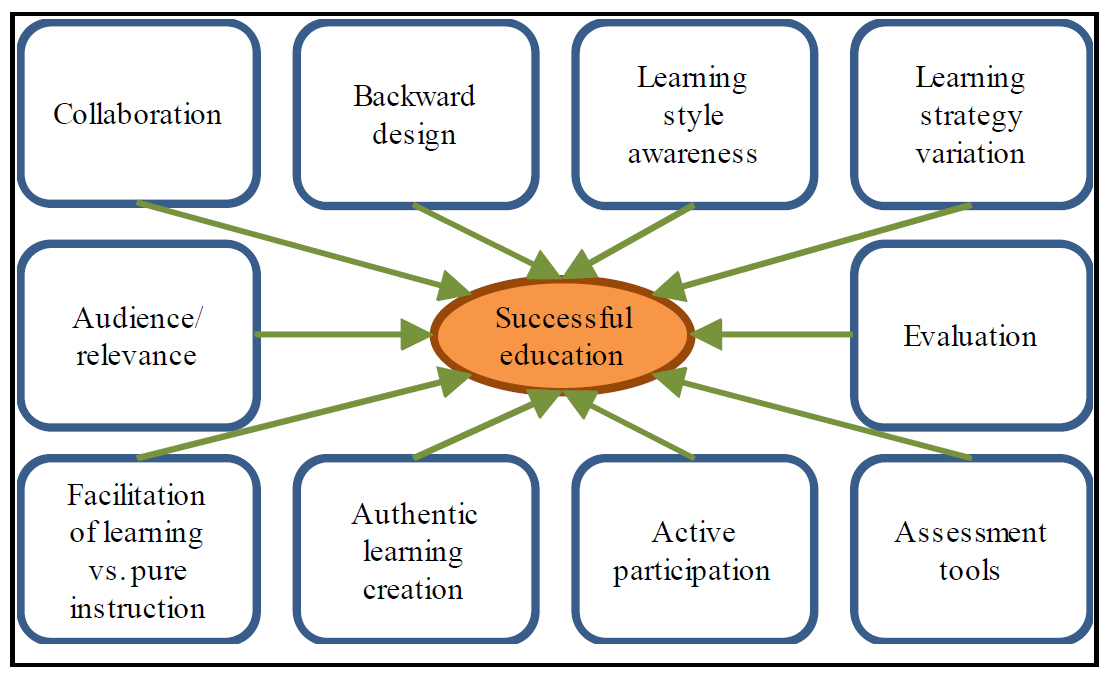
In order to introduce the curricular design, it is important to figure out the key components for the successful education, and then to examine the implementations based on these components. It is well known that education is one form of training. The training is the process designed to help a person to acquire knowledge, skills, and competencies. Ten key components for success training include (i) collaboration, (ii) starting with the end in mind (backward design), (iii) awareness of learning styles, (iv) use of a variety of learning strategies, (v) awareness of audience/relevance, (vi) facilitation of learning vs. pure instruction, (vii) creation of authentic learning, (viii) active participation, (ix) use of assessment tools and (x) evaluation (see Fig. 2)[27,28]. The best education and curricula design is to include all the components.
Fig. 2: Ten key components for the successful education
C. Structure of hierarchical curricula
The structure of the robotics curricula is gradual and hierarchical. The students must rise to the challenges of the more advanced courses while they keep progressing in their studies. Commonly, mastery of fundamental knowledge determines whether they can understand more sophisticated concepts. It is necessary for students to figure out how scientific theories are developed and what their limitations are, and then, to explore the potential applications of these theories[29]. Theoretically, the students who enrolled in the robotics classes are assumed having the fundamental knowledge as shown in Fig. 1 and Table I. when they finish the fourth semester[30, 31, 32, 33, 34, 35, 36]. Following that, higher-level courses are given. By integrating the theories into the practice, the students can overcome the difficulties of the abstract theories, and develop their own applications.
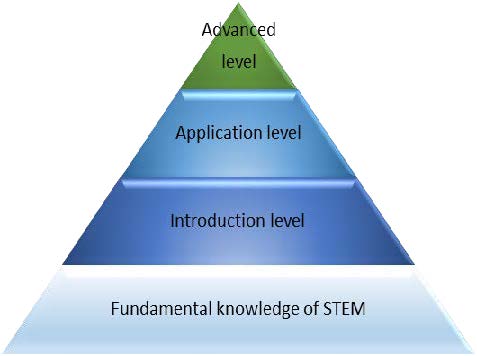
Therefore, the ideal arrangement of different levels of robotics courses should be in a scaffolding form and range from ‘introduction’, ‘application’ to ‘advanced’. The structure of hierarchical curricula can be found in Fig. 3. The courses at the introduction level are used to go over the fundamental knowledge, typical applications, usage of basic components, and embedded programming. These aspects, in fact, are very important for future study in the program of robotics. The other courses taken by students include “Quality Control”, “Advanced Solid Modeling”, “Simulation and Visualization”. After the specific training obtained at the first level of courses, the students have had commonsense and skills to go to the next level. At the application-level, the courses will focus on the exploration of the potential applications of the knowledge introduced in the introduction level while the theories are expanded. The aim of these courses is to consolidate the fundamental knowledge and sharpen the hands-on skills. In addition, the protocols of communication and interfaces will be discussed in detail. Following these, the students should have the ability to integrate the theories into some advanced applications, for example, the rescue robot, the smart building, and the robot arm. During this period, the students also take “Mechanical Measurements and Instrumentation”, “Advanced Strength of Materials”, and other flexible core courses (“Vibration and Advanced Dynamics” or “Finite Element Methods”). At the advanced level, the courses will introduce advanced control theories, advanced algorithms, and cognition in robotics. Therefore, the PID control, the algorithms of AI, and the knowledge of machine learning should be introduced and practiced. The anticipated outcomes of these courses will be that the students can solve the practice problems by themselves. In this level, many challengeable courses are provided simultaneously, which include “Project Management”, “Fluid Mechanics”, “Senior Design Project”, “Computer-Integrated Manufacturing”, and “Computer- Integrated Manufacturing”.
Table 1. Fundamental Knowledge of STEM in the First Two Years
| Math | • Calculus: convolution • Differential equations: • Linear algebra: matrix and operation • Statistics: Bayes theorem |
| Science | • Chemistry: chemical sensor • Physics: thermal sensor • Liberal courses: logic thinking |
| Engineering | • Materials: processing and fabrication • Mechanics: failure theories • Dynamics: movement analysis • Drawing: PCB and structure drawing • Electric and electronics: impedance, signals processing |
| Technology | • Machining and Tooling: manufacturing methods and operation of machines • Soldering: ability to integrate components • Programming: embedded programming • CAD: design circuit and structure |
Fig. 3: Structure of hierarchical curricula of robotics
III. DESIGN OF ROBOTICS CURRICULA
A. Courses of introduction level
The goal of the introductory course is to expose the students to robotics concepts, applications, and fundamental theories. Then, the students can deepen their understanding of the fundamental knowledge and familiarize themselves with the basic robotics techniques.
The anticipated students’ outcomes include: (1) Be able to gather, interpret, evaluate, and integrate information from a variety of sources. (2) Be able to communicate clearly and effectively. (3) Be able to function as an effective team member. (4) Gain or improve capabilities: (a) Apply the theoretical knowledge including the principles of analog and digital logic, concepts of digital logic analysis and design, microprocessor fundamentals and programming microcontrollers using C programming language. (b) Improve technical ability with an emphasis on the use of microcontrollers and programmable logic devices to interface with mechanical devices. (c) Using technology in conjunction with established theory to analyze mechatronic design problems.
Based on the key components of the successful education (refer to Fig. 2), the qualifications of the students should be taken into account, and this aspect corresponds to the component of ‘audience/relevance’. As discussed in the first part of this paper, the students of MET have three difficulties when they take the robotics courses. In order to overcome these difficulties and let the student well prepared for the challenges from the upcoming high levels of courses, the basic level was designed.
There is only one basic level of course. This course is named “Introduction to Embedded Systems Fundamentals and Applications in Robotics”. In this course, the students are required to design a simple robotics system composed of mechanical transmission, chassis, power source unit (PSU), control module, and the communication module (refer to Fig. 4). Through a series of design procedures, the students can master discipline-specific knowledge, skills, and tools. They can improve their capabilities with respect to the theoretical knowledge, the applications of hardware and software, the problem analysis, and the collaboration. In this course, the specific robotics system was a robot car called MazeBot. This was designed as a group project. The MazeBot was required to find out a path to escape from a maze. The project was decomposed into different parts based on Fig. 4, and the final design was assumed to complete step by step with the proceeding of the course. This method was supported by several components of successful education: ‘facilitation of learning’ (students take more control of their learning process by intensive hands-on experiments), ‘collaboration’ (group projects enhance the collaboration between each other), ‘learning style awareness’, ‘learning style variation’ (students are well known to the difference between the lecture-based and hands-on based classes. They enjoy the hybrid learning style, and are willing to be active during the project-based classwork) and ‘active participation’(The students are required to complete all the hands-on work by themselves, and are encouraged to expand the project into the practice).
Fig. 4: Structure chart of robotics system designed in class
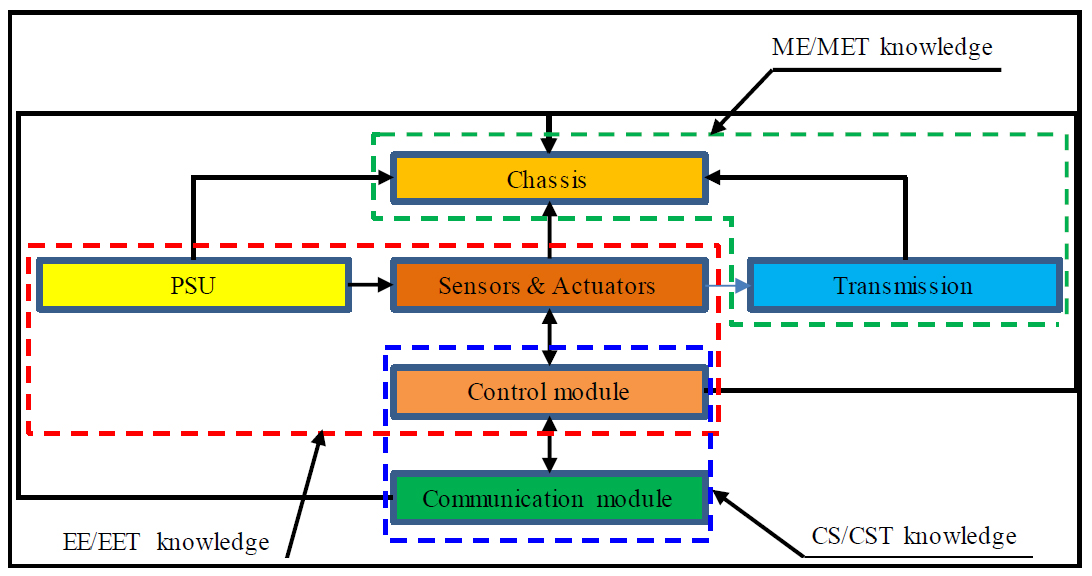
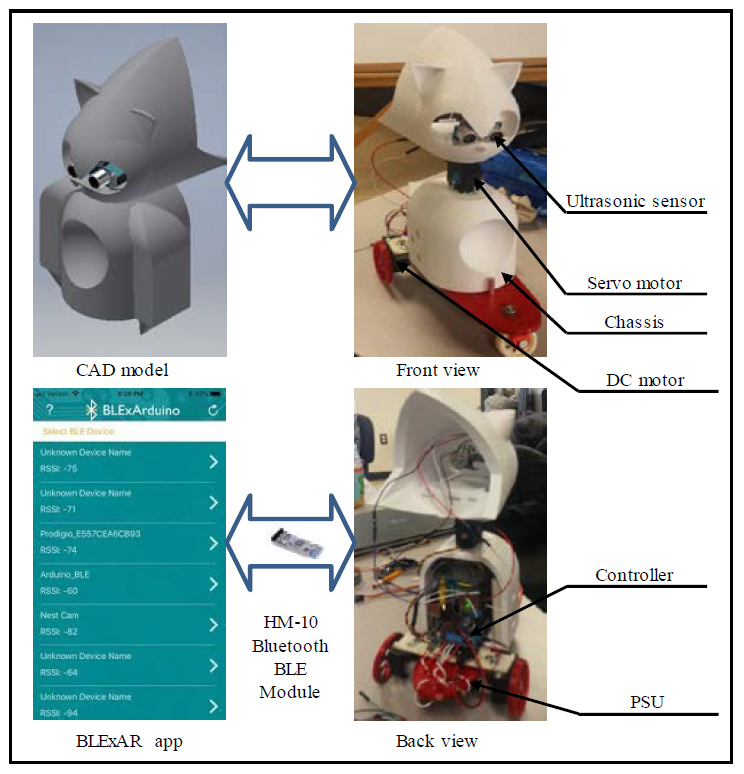
At the beginning of this course, the embedded development kits (EDK) based on Arduino UNO R3[37] and the project of MazeBot were introduced. Then, the students were guided to go over and practice the fundamental knowledge of ME, EE, CS and IT through the EDK and the project. When the PSU was introduced, the analog circuit and corresponding components (resistor, capacitor, and inductor) were practiced in order to achieve a steady power source. When the EDK was employed, the fundamental knowledge of EE and CS were practiced which included the single-chip processor, peripheral circuit, serial communication, DA/AD converter, timer, logic, and embedded programming. For the part of sensors, only several simple sensors including thermosensor, IR sensor, and ultrasonic sensor were introduced in this course. For actuators, the relay, DC motor, and servo motor were introduced. The digital circuit and transistors were practiced during designing the control circuit of the motors. The Bluetooth-based wireless control was integrated into the MazeBot, and its function was to switch the power remotely via a smartphone[38]. All these works took 9 weeks. Although some new knowledge was discussed, the main goal of the above implementations was still to go over and apply the fundamental knowledge mastered in the first two years. Therefore, this process complied with the component of ‘backward design’. Following that, the chassis and transmission system of MazeBot were designed. In this part, the knowledge of machine design, CAD, and mechanics was employed. It took 2 weeks since the students in MET had a solid knowledge of ME[39]. Next, the students took 3 weeks to assemble the MazeBot, develop the algorithm to enable the MazeBot escaping from the maze, test the MazeBot, demonstrate their achievements, and present their projects. This 3-week time was a period of ‘evaluation’ and ‘assessment’. Hitherto, all ten components of successful education had been included in this project-based course. One of the MazeBots designed by students can be found in Fig. 5. This design employed the ultrasonic sensor, servo motor, DC motor, Bluetooth module, motor controller, Arduino EDK, the knowledge of CAD, programming, circuit design, algorithm design, and wireless communication. In addition, the appearance of Mecha Sonic demonstrated the students’ imagination and the solid fundamental knowledge of industrial design.
B. Courses of application level
In this level, the goal is to let students master the applications of popular sensors and actuators, practice various communication methods based on different protocols, and combine the fundamental knowledge, skills and simple projects into complicated projects.
Fig. 5: MazeBot with the appearance of Mecha Sonic.
The anticipated students’ outcomes include: (1) Be able to apply theoretical knowledge combined with the sensors & actuators into the project design. (2) Develop algorithms and programs to control the motion of simple mechatronic devices with the actuators and sensors. (3) Select appropriate devices for an embedded application to fabricate an applicable mechatronic system. (4) Improve the ability of collaboration.
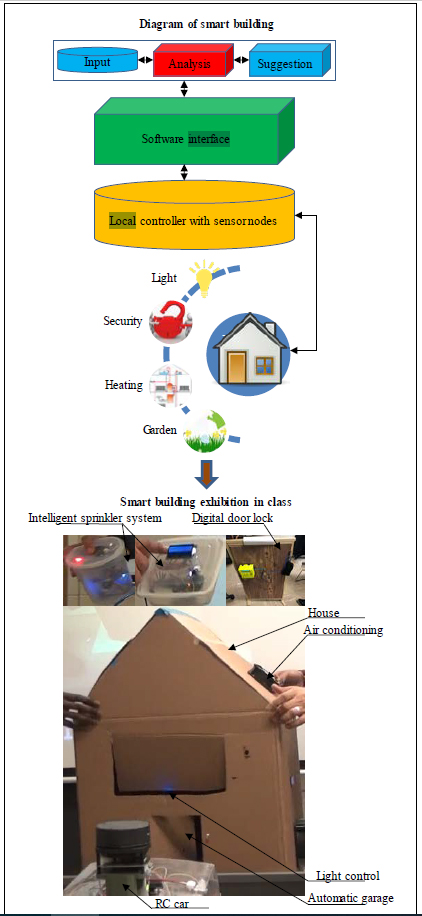
The course name, at this level, is “Actuators and Sensors Application in Robotics”. In this course, an educational framework of wireless sensor and control network was employed. The Arduino MEGA 2560 board, sensor and actuator kit was selected to implement the hands-on experiments. The students were assigned to different projects. Finally, one large project named ‘smart building’ synthesized some of these projects. This large project fully employed the educational framework to realize remote access and control to the appliances of the building. More details about this course can be found in [39]. The final project can be found in Fig. 6 [39]. In addition, the design of this course also obeys the rule: the ten components of successful education should be involved.
Fig. 6: Project of smart building
C. Courses of advanced level
The courses of advanced level try to deliver and practice advanced knowledge involving hydraulic control, pneumatic control, PID control, and AI. There are two courses. One is “Control Systems in Robotics”. The other is “Robotic Systems Design and Applications”. The rule of the course design is the same as the former two levels. In the first course, the control techniques are emphasized. In the later one, the cutting-edge techniques of robotics are employed.
In the first course, the anticipated students’ outcomes include: (1) Demonstrate the knowledge of basic control theories used in the robotic systems. (2) Apply proper PID control techniques when designing smart devices or robotics that show proper dynamic behaviors. (3) Establish mathematical models based on electrical and mechanical principles. (4) Demonstrate the ability to communicate effectively and work as contributing partners for group projects.
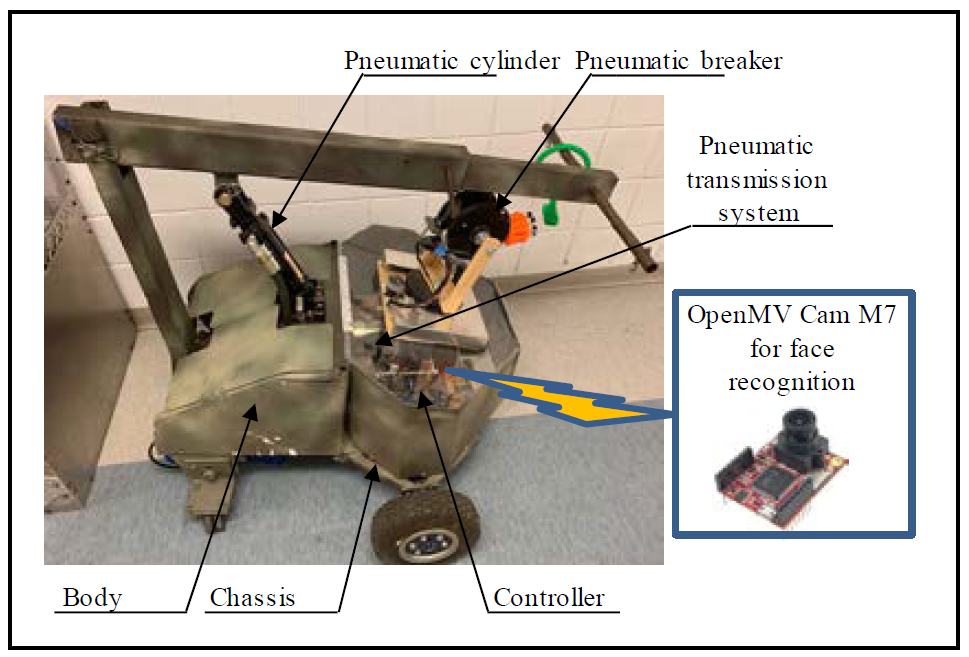
In this course, the students were given the assignment of a project which must employ multiple control strategies and techniques involving hydraulic control, pneumatic control and PID control besides the skills gained through the courses of introduction level and application level. One of the projects named RescueBot in this course can be found in Fig. 7. As an unmanned vehicle, RescueBot was designed to clear the obstruction on the road. It was equipped with a gyroscope, three ultrasonic sensors, pneumatic transmission system, and pneumatic breaker. The technique of path management was employed to realize self-driving in which the path was planned and optimized by dealing with a straight path, circle path, and the combination of the two types of paths[40]. The pneumatic breaker was used to destroy and clear the obstructions.
Fig. 7: RescueBot
In the second course, the anticipated students’ outcomes include: (1) Be able to apply basic AI algorithms. (2) Use rapid prototyping techniques to fabricate components for their design projects based on the multidisciplinary design knowledge and skills. (3) Improve the ability of collaboration and prepare for future job seeking.
In this course, AI is introduced and combined with the skills from the other three courses. One of the applications of AI used here was object recognition based on vision and machine learning. During this course, the students were guided to study the basic concepts involving data training, data classification, decision tree, and search algorithm. Following that, they were instructed to use the machine learning module and object recognition module in OpenCV to develop their own applications. One of the projects was SocialBot which had the abilities of face recognition and speech recognition (refer to Fig. 8). SocialBot was composed of two Raspberry Pi boards to process and manage the data, two ‘OpenMV Cam M7’ cameras to acquire image information, one ‘ReSpeaker Mic Array’ mic array to realize speech recognition and one servo motor to rotate the head. For the details of the face recognition can be found in[41]. The method of speech recognition with ‘ReSpeaker Mic Array’ can be found in[42]. Since the limitation of the course hours, the mobility of the SocialBot was taken away, but the students enjoyed their achievement brought by the cutting-edge techniques.
IV. OPERATION, OUTCOMES, AND DISCUSSION
A. Operation
The robotics program has been operated for 5 years, but it is still a new concentration compared with other concentrations in the department. Hitherto, one round has been implemented. Only the students of MET are enrolled in this series of classes. In the first level, there are about 20 students including sophomore and junior each semester. During the implementation, most of the students are willing to continue the robotics classes. Therefore, in the second level, there are about 18 students each semester. For the advanced level of classes, they are given in different semesters to guarantee the number of students in each class (about 17 students per class). In addition, any student who has taken either course of the first level and second level are qualified to enroll in the advanced classes. All the courses are administrated by the instructors who take the responsibility of preparing the experiments. Moreover, a peer assessment mechanism is established to evaluate the performance of the students. This mechanism combines the instructors’ evaluation (70%) and the evaluation from other students in the class (30%) to decide the final individual grade. Besides these, the instructors will review the project report and make sure plagiarism-free.
The grading rubric used in class refers to Table II. This rubric uses a full 100 points to make a big difference in the credit products students can get. The students are credited based on the quality of their work with respect to each perspective. Then, the final scores will be the sum of all the sub-grads. In this table, the “Relevance” means that whether the projects use the knowledge from the class or the extension (papers or online materials) to the class. The classed are used to let the students learn and improve their hands-on skills, all the class-related materials can be applied in the project. Certainly, the plagiarism is definitely checked. Therefore, the students must provide appropriate references if they use extensive materials. For example, a robot car in the introduction level class has the function of facial recognition. The grade will be lower than others if the performance of the motor control is weaker than others no matter how their vision-based work is perfect or not because the vision-based work is taken as the weak-connected knowledge. To the “Contribution”, this is used to encourage the students to integrate the knowledge into practical applications. Therefore, the students must propose their projects and explicit the specific application of their project in the real world. “Innovation” mainly shows the students’ ability to employ new techniques to develop their projects. For example, the application of Bluetooth techniques in the application level of course. The “Technological Sophistication” is taken as a comprehensive indicator to evaluate whether the students demonstrate the ability to logically synthesize the in-class knowledge and the extension together instead of a simple overlap. For instance, the multiple sensed data from different sensors must be furtherly processed and used to help to make control decisions if the least square root method is employed in the advanced level of course. To the “Economic efficiency”, the students must articulate that their project is created based on the cost-manufacturing graph. Through the performances in these projects, the anticipated outcomes of the students can be inspected thoroughly.
Fig. 8: SocialBot
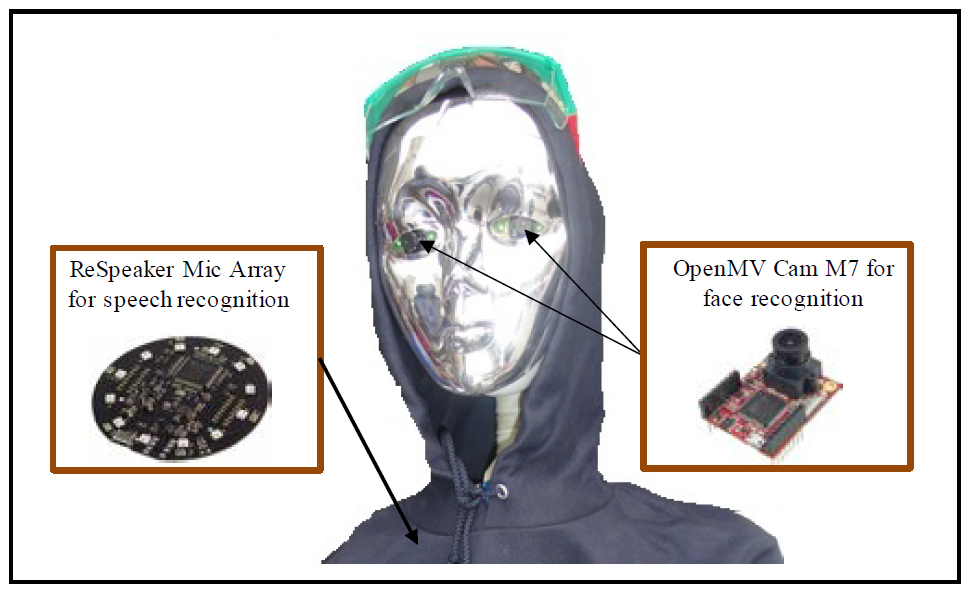
Table 2. Grading Rubric
| STANDARD | FULL SCORE |
|---|---|
| Relevance: Rate how the project is relevant to the class | 20 |
| Contribution: Rate how this project makes a contribution to practical applications | 20 |
| Innovation: Rate how this project applies new ideas into the design | 20 |
| Technological Sophistication: Rate how this project is sophisticated | 20 |
| Economic efficiency: Rate how this project cost | 20 |
B. Outcomes
Through the 5-year operation, most of the students have satisfied performance in their class projects. Certainly, the important evaluation standards of the courses are (1) the improvements in respect to the knowledge and the skills, (2) the students’ career prospects.
For the first standard, the in-class projects have shown that the students can master and apply the interdisciplinary knowledge, can solve the practical problems, can explore the potential applications of the fundamental theories, can employ modern design tools, and can demonstrate the creativity. In the project-based courses, the students gradually increase their capabilities following the scaffolding structure of the courses. The final scores of the students are composed of 10% for the participation in class including attendance, behaviors, motivations; 20% for the homework; 25% for the midterm and 45% for the projects. After completing the projects, the final scores are graded, and the final scores range from 82 to 96. In addition, the pre-class and post-class surveys for the specific skills show that the students have more confidence in their knowledge after the classes (refer to Table III). Moreover, the students’ performances are evaluated based on the requirement of the anticipated outcomes. Through both the self-evaluation and the instructors’ evaluation, the students have proved that they are well prepared for future challenges with respect to the knowledge and skills in the area of robotics.
Table 3. Skills Self Evaluation Survey
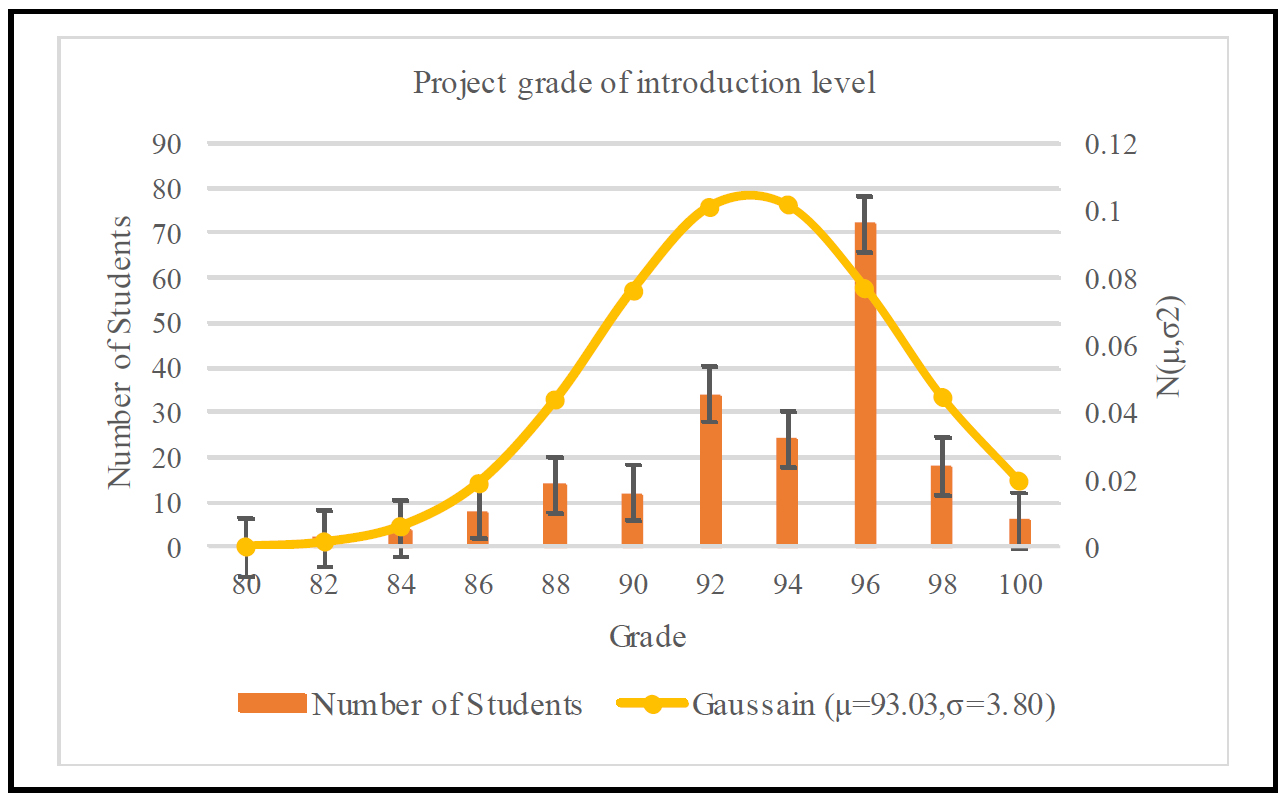
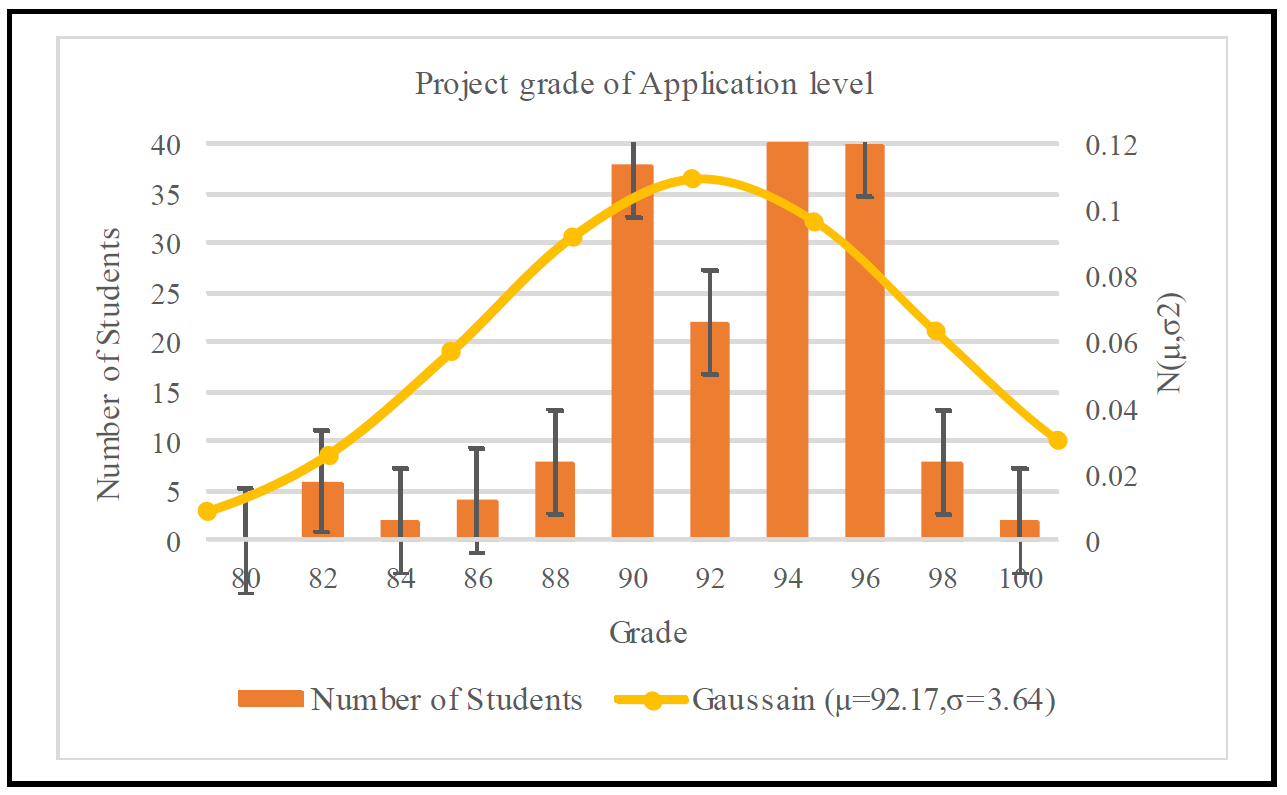
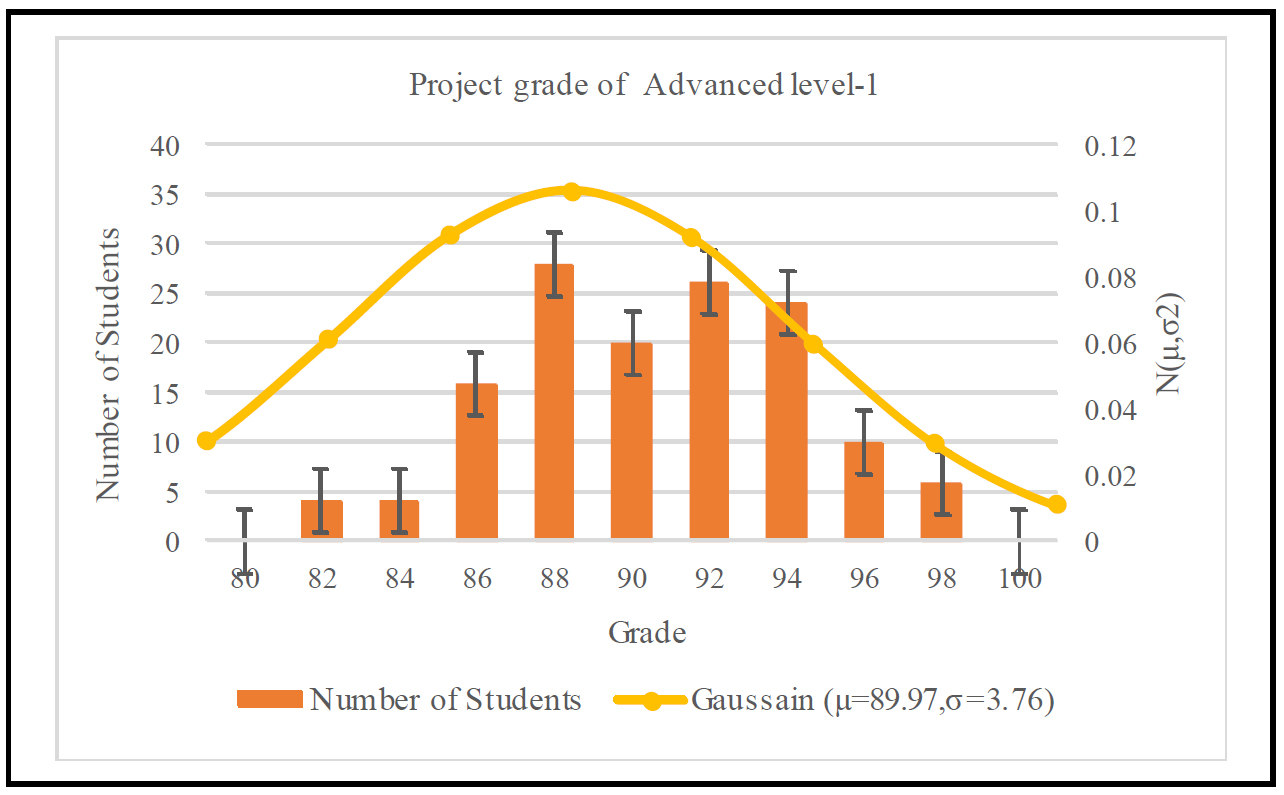
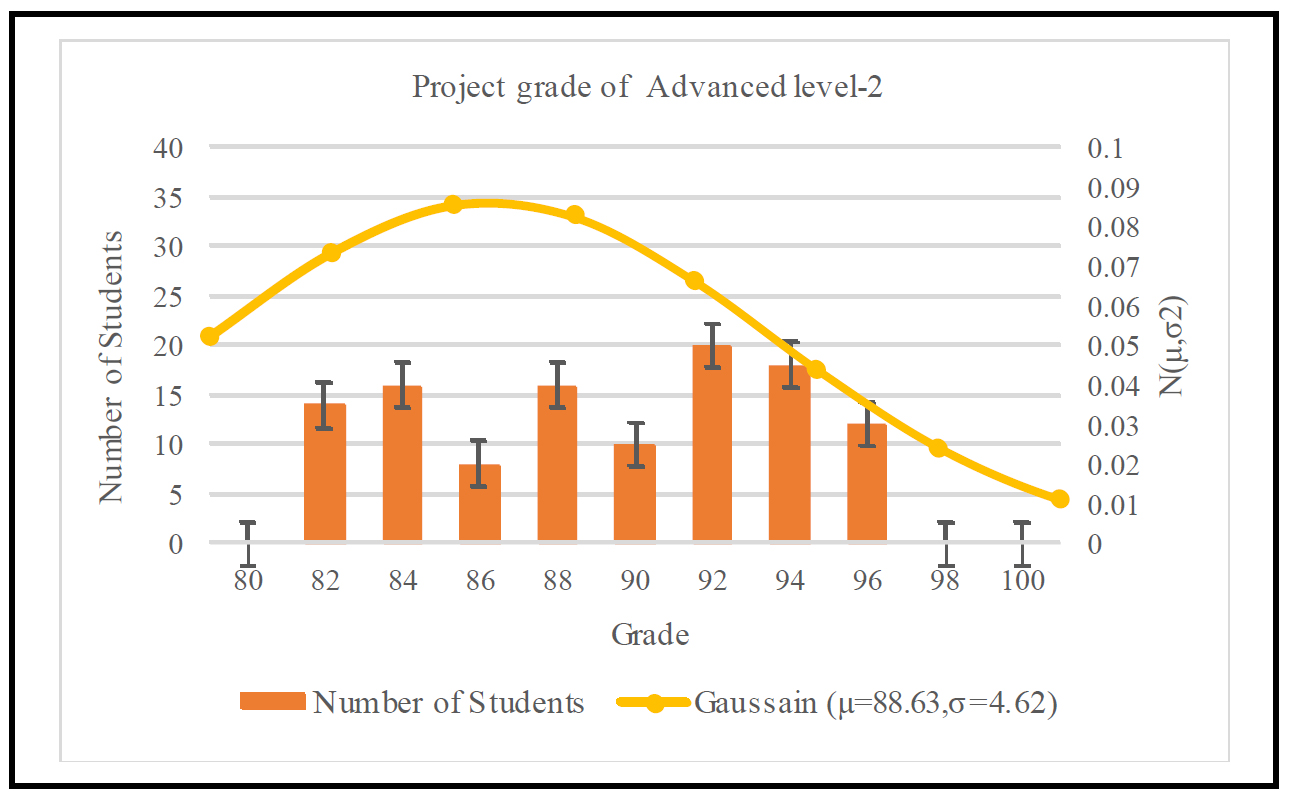
In order to show the students’ achievements in class, the project grades of all enrolled students in each course are collected and analyzed. At the same time, it is assumed that the student meets the least requirement of the course if his or her grade is better than 80. So, if this assumption is taken as a statistical hypothesis, and the corresponding p-value or level of significance is 5% (left-tail event), the observed data (student grade) have a higher significance. Based on the collected data, the p-value can be obtained. Therefore, the statistical results are shown in (a) through (d) are reasonable. In these 4 diagrams, the total students counted are 194 for introduction level, 176 for application level, 138 for advanced level-1, and 114 for advanced level-2. The relatively lower number in advanced levels results from the availability of these two courses since they are not provided simultaneously. In addition, with the increase in the difficulty, the quality of the projects has a little bit of decline. Therefore, the grade of the project is also declined with the increment of the course level. The main reason for this trend is that the projects are more and more complicated, and the probability of malfunction is increased accordingly during the demonstration of the prototype, especially in the advanced level-2 classes. One more thing is that the standard error in Fig. 9 (d) is a little larger than others, and it means that the performance of the students tends to diverge due to the polarization of the project integrity.
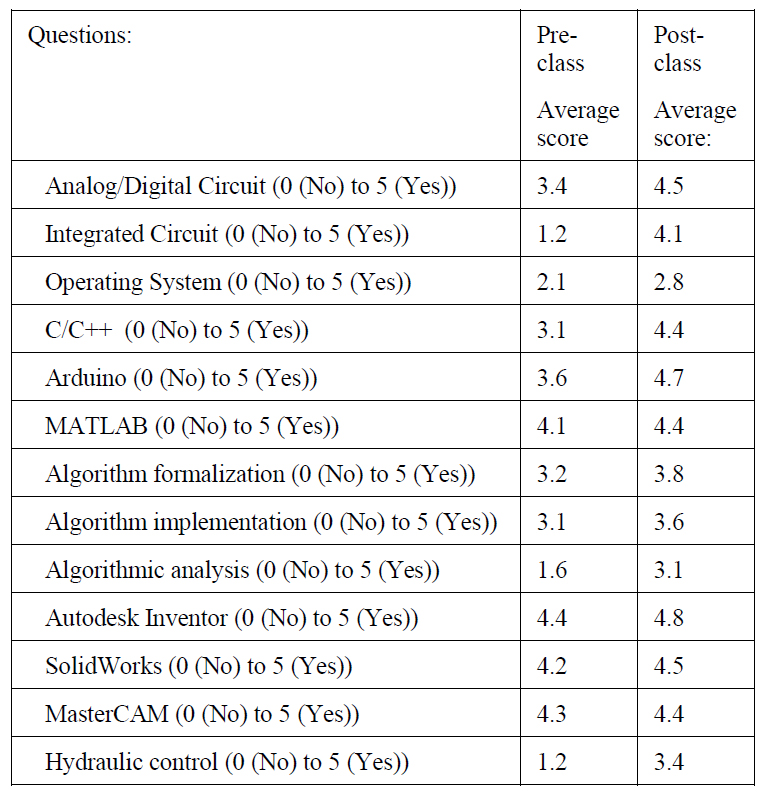
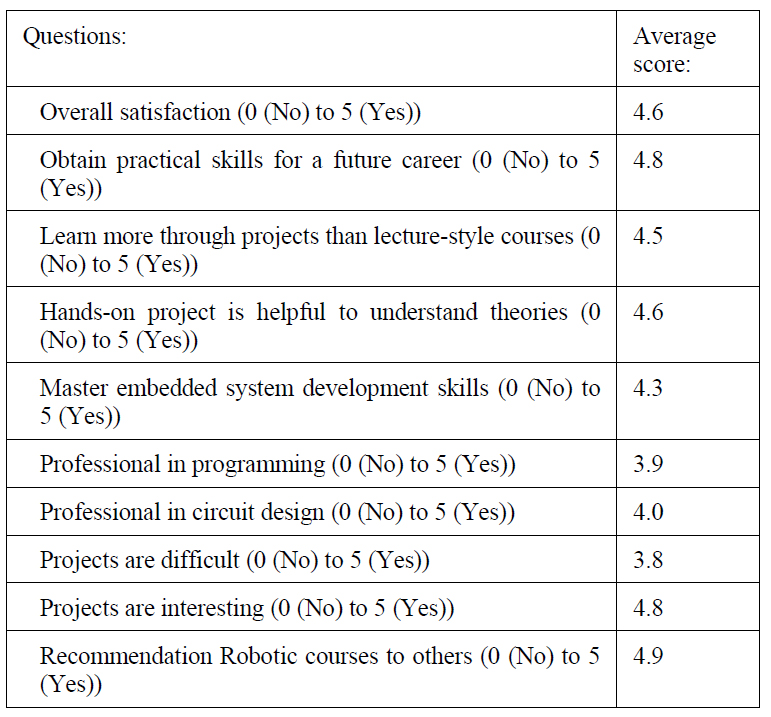
Besides the project grade analysis, an assessment survey is administered at the conclusion of each course. The questions of the survey and average scores (on a scale of 1 to 5) of the answers are listed in Table IV. This survey shows that the students in the robotics classes have gained great confidence by taking the courses, developing the projects and employing modern design tools. Furthermore, the students also have a strong interest in the robotics classes, and they are willing to recommend their classes to others. Hence, the designed curricula are successful with respect to the students’ feedback.
For the second standard, statistics about the internship and the fulltime positions received by the students of the robotics program of MET is made. The results of the statistics show that 78% of the junior students can get offers of internship of robotics, and 87% of the graduates can find full-time jobs related to robotics once graduating. These results are much better than other traditional concentrations of ME/MET (67% and 71% separately). Therefore, both the students’ performance and their career prospects prove that the robotics courses are helpful to operate the robotics program in the department of MET.
C. Discussion
One of the main challenges during designing the curricula is to let the students familiarize themselves with the robotics system, the design procedures and the practical applications of the fundamental knowledge while avoiding to expose to the complicated theories. In order to overcome this challenge, the classwork mainly focuses to guide the students to learn the catalogs of components used in the common robotics systems. Then, they are guided to learn the how to read, understand and use manufacturing datasheet to find out the critical parameters of the components, for example, the voltage, current, and outline drawing of a capacitor, or the input, output, logic, and recommendation peripheral circuit for an ATmega2560 CPU. After that, the students directly use the ready to use an experimental platform to test the performance of the components instead of analytical calculations. For example, in the application level classes, the students are given a wireless sensor and control network framework. The students are required to learn the data acquisition, the usage of sensors, the application of the communication protocols and the motor controllers. After that, the students do not need to immerse themselves in complicated algorithms with respect to data processing.
Figure 9. Project grade statistical result of four courses
(a) Introduction Level
(b) Application Level
(c) Advanced Level-1
(d) Advanced Level-2
On the other hand, the students learn how to use electrical computer design software (EAD) to design and simulate the circuit, and how to use the dynamics and kinematic analysis software to simulate a robotic mechanism. By the employment of the EAD software, the students will not directly learn how to operate the registers, how to analyze a complicated circuit, how to deal with the break, and how to design the data processing algorithms. By the application of the dynamics and kinematic analysis software, the students can adjust the links, the masses, the joints, and freedoms without the concern of the complex operations of matrix and differential equations.
Therefore, both the contents of hardware and software facilitate the students to succeed in class without evolving in pure theoretical analysis. It is worth mentioning that the graduate of B.Tech. are often engaged in the jobs of marketing and maintenance. These jobs highly require a wide horizon of knowledge and plenty of practical experiences. The designed curricula can provide a chance to the students to learn common and up-to-date robotics systems and components while enhancing their hand-on ability by the class projects, and then, let them competitive and well prepared for their future careers.
Table 4. Post-Class Survey Results
V. CONCLUSIONS AND FUTURE WORK
In this paper, the design of curricula for the robotics program of MET is introduced. This work is the most critical part of a hands-on-project-based program. In order to explain why the curricula design is necessary, the difficulties faced by students of the robotics program of MET are discussed. Then, the hierarchical curricula in the robotics program are presented after a series of discussions including a survey of the robotics curricula, an introduction of the component of successful education, and the structure of hierarchical curricula. Following that, the scaffolding structure curricula are designed, which include introduction level, application level, and advanced level. The introduction level is to combine the fundamental STEM knowledge together to enable students solving practical problems. The application level is to guide the students to expand the application of the theories. The advanced level is to facilitate the students to integrate the cutting-edge techniques into practical applications. It has been proved that the designed curricula can enhance the students’ understanding of the fundamental concepts, can inspire the students’ interest in robotics, and can improve the students’ performance. In the future, the robotics curricula will be optimized further to adapt to the development of society. In addition, more up-to-date techniques will be introduced and applied in-class projects.
ACKNOWLEDGEMENT
The authors wish to thank the students of the robotics program in CUNY New York City College of Technology.
REFERENCES
[1] Türk, D.A., Triebe, L. & Meboldt, M., 2016, “Combining additive manufacturing with advanced composites for highly integrated robotic structures”, Procedia CIRP, Vol. 50, pp 402-407.
[2] Hamblen, J.O. & Van Bekkum, G.M., 2013, “An embedded systems laboratory to support rapid prototyping of robotics and the internet of things”, IEEE Transaction of Education, Vo. 56, No. 1, pp. 121-128.
[3] Brady, M., 1984, “Artificial intelligence and robotics”, In Robotics and Artificial Intelligence, pp. 47-63, Springer, Berlin, Heidelberg.
[4] Zhang, Z., Zhang, M., Chang, Y., Aziz, E.-S., Esche, S. K. & Chassapis, C., 2018, “Collaborative virtual laboratory environments with hardware in the loop”, In Cyber-Physical Laboratories in Engineering and Science Education, Springer, pp. 363-401.
[5] Wisskirchen, G., Biacabe, B.T., Bormann, U., Muntz, A., Niehaus, G., Soler, G.J. & von Brauchitsch, B., 2017, “Artificial intelligence and robotics and their impact on the workplace”, IBA Global Employment Institute.
[6] Yang, G.Z., Bellingham, J., Dupont, P.E., Fischer, P., Floridi, L., Full, R., Jacobstein, N., Kumar, V., McNutt, M., Merrifield, R. & Nelson, B.J., 2018, “The grand challenges of science robotics”, Science Robotics, Vol. 3, No. 14, pp. eaar7650-7664.
[7] Stern, F., Xing, T., Muste, M., Yarbrough, D., Rothmayer, A., Rajagopalan, G., Caughey, D., Bhaskaran, R., Smith, S. & Hutchings, B., 2003, Integration of simulation Technology into undergraduate engineering courses and laboratories”, Proceedings of ASEE 2003 Annual Conference, Nashville, Tennessee, USA, June 22-25, 2003.
[8] Jovanovic, V., Verma, A. & Tomovic, M.M., 2013, “Development of courses in mechatronics and mechatronic system design within the mechanical engineering technology program”, Proceedings of the 11th Latin American and Caribbean Conference for Engineering and Technology, 14 – 16 August, 2013, Boca Raton, Florida, USA.
[9] Jovanovic, V.M., Michaeli, J.G., Popescu, O., Moustafa, M.R., Tomovic, M., Verma, A.K. & Lin, C.Y., 2014, “Implementing mechatronics design methodology in mechanical engineering technology senior design projects at the Old Dominion University, Proceeding of 121st ASEE Annual Conference & Exposition, Indianapolis, Indiana, USA, June 15-18, 2014.
[10] https://floridapoly.edu/difference-engineering-technology-degree- bachelor-science-engineering/, accessed in February 2020.
[11] Gqibani, S., Clarke, N. & Nel, A.L., 2018, “The order of skills development for technician and technologist training curricula”, Proceedings of 2018 IEEE Global Engineering Education Conference, Santa Cruz de Tenerife, Canary Islands, Spain, April 18-20, 2018.
[12] Zhang, Z., Zhang, A.S., Zhang, M. and Esche, S.K., 2019, “Design and application of a platform of wireless sensor and control network in robotics course of mechanical engineering technology”, Computers in Education Journal, Vol. 10, No. 1, pp. 1 – 7.
[13] Cheng, H., Hao, L., Luo, Z. & Wang, F., 2016, “Establishing the connection between control theory education and application: an Arduino based rapid control prototyping approach, International Journal of Learning and Teaching, Vol. 2, No. 1, pp. 67-72.
[14] http://www.citytech.cuny.edu/catalog/docs/catalog.pdf, accessed in February 2020
[15] Karim, M.E., Lemaignan, S. & Mondada, F., 2015, “A review: Can robots reshape K-12 STEM education”, 2015 IEEE international workshop on Advanced robotics and its social impacts (ARSO) (pp. 1- 8), IEEE.
[16] Gennert, M.A. & Putnam, C.B., 2018, “Robotics as an Undergraduate Major: 10 Years’ Experience”, Proceedings of 125th ASEE Annual Conference & Exposition, Salt Lake City, UT, USA, June 24-27, 2018.
[17] Harbour, D. & Hummel, P., 2010, “Migration of a robotics platform from a freshman introduction to engineering course sequence to a sophomore circuits course, Proceedings of Frontiers in Education Conference, Arlington, Virginia, USA, 27 – 30 October 2010.
[18] Tester, J.T., 2008, “Management of a large team-design and robotics- oriented sophomore design class”, Proceedings of 38th ASEE/IEEE Frontiers in Education Conference, October 22 – 25, 2008, Saratoga Springs, NY, USA.
[19] Azemi, A. & Esparragoza, I., 2005, “Problem-based collaborative projects in and between freshman and sophomore engineering courses”, Proceedings of ASME 2005 International Mechanical Engineering Congress and Exposition, Orlando, Florida, USA, November 5 – 11, 2005.
[20] Zhang, M., Duan, P., Zhang, Z. and Esche, S.K., 2018, “Development of telepresence teaching robots with social capabilities”, Proceeding of ASME International Mechanical Engineering Conference & Exposition IMECE’18, Pittsburgh, PA, USA. November 9-15, 2018.
[21] Momeni, A., Previlon, F., Despopoulos, A., Schirner, G., Kimani, J. & Kaeli, D., 2015, “Engaging sophomores in embedded design using robotics”, Proceedings of the Workshop on Computer Architecture Education, Portland, OR, USA, June 13, 2015.
[22] Mataric, M.J., 2004, “Robotics education for all ages”, Proceedings of AAAI Spring Symposium on Accessible, Hands-on AI and Robotics Education, Stanford University, Palo Alto, California, USA, March 22– 24, 2004
[23] Correll, N., Wing, R. & Coleman, D., 2013, “A one-year introductory robotics curriculum for computer science upperclassmen”, IEEE Transactions on Education, Vol. 56, No. 1, pp. 54 – 60.
[24] Cappelleri, D.J. & Vitoroulis, N., 2013, “The robotic decathlon: Project- based learning labs and curriculum design for an introductory robotics course”, IEEE Transactions on Education, Vo. 56, No. 1, pp. 73 – 81.
[25] Ciaraldi, M., Cobb, E., Looft, F., Norton, R. & Padir, T., 2009, “Designing an undergraduate robotics engineering curriculum: Unified robotics I and II”, Proceedings of the 2009 ASEE Annual Conference & Exposition, Austin, Texas, USA, June 14 – 17, 2009.
[26] Padir, T., Gennert, M.A., Fischer, G., Michalson, W.R. & Cobb, E.C., 2010, “Implementation of an undergraduate robotics engineering curriculum”, Computers in Education Journal, Vo. 1, No. 3, pp. 92-101.
[27] http://www.pages.drexel.edu/~ctc27/tenkey.html, accessed in February 2020.
[28] Chang, Y., Aziz, E.-S., Zhang, Z., Zhang, M. & Esche, S. K., 2016, “Usability evaluation of a virtual educational laboratory platform”, Computers in Education Journal, Vol. 7, No. 1, pp. 24-36.
[29] Danielson, S., Hawks, V. & Hartin, J.R., 2006, “Engineering technology education in an era of globalization”, Proceedings of the 36th Frontiers in Education Conference, San Diego, California, USA, October 28-31, 2006.
[30] Worcester Polytechnic Institute, “Undergraduate catalog 2018 – 2019”, Wpi.edu.
[31] New York City College of Technology, “Catalog spring 2019”, Citytech.cuny.edu.
[32] University of California Santa Cruz, “Robotics engineering B.S. degree 2017-2018 curriculum chart”, Ucsc.edu
[33] University of Michigan Dearborn, “Robotics engineering core curriculum 2018”, Umdearborn.edu.
[34] Lawrence Technological University, “Bachelor of science in robotics engineering (BSRE) flowchart, Fall 2017”, Ltu.edu.
[35] Central Conneticut State University, “Bachelor of science in robotics and mechatronics engineering technology program”, Ccsu.edu.
[36] Purdue University, “2018 – 2019 University catalog: robotics engineering technology, BS”, Purdue.edu.
[37] Barrett, S.F., 2013, “Arduino microcontroller processing for everyone!”, Synthesis Lectures on Digital Circuits and Systems, Vol. 8, No. 4, pp. 1- 513.
[38] https://engineersportal.com/blexar, accessed in February 2020.
[39] Zhang, Z., Zhang, A.S., Zhang, M. & Esche, S.K., 2018, “Conceptual framework for integrating a wireless sensor and control network into a robotics course for senior students of mechanical engineering technology”, Proceedings of the 2018 ASEE Annual Conference & Exposition, Salt Lake City, UT, USA, June 24-27, 2018.
[40] Liu, Y. & Bucknall, R., 2015, “Path planning algorithm for unmanned surface vehicle formations in a practical maritime environment”, Ocean Engineering, Vol. 97, pp. 126-144.
[41] Zhang, Z., Aziz, E.S., Esche, S. & Chassapis, C., 2018, “A virtual proctor with biometric authentication for facilitating distance education”, In Online Engineering & Internet of Things, pp. 110-124, Springer, Cham.
[42] http://wiki.seeedstudio.com/ReSpeaker_Mic_Array_v2.0/, accessed in February 2020.